 2/6
2/6 3/6
3/6 4/6
4/6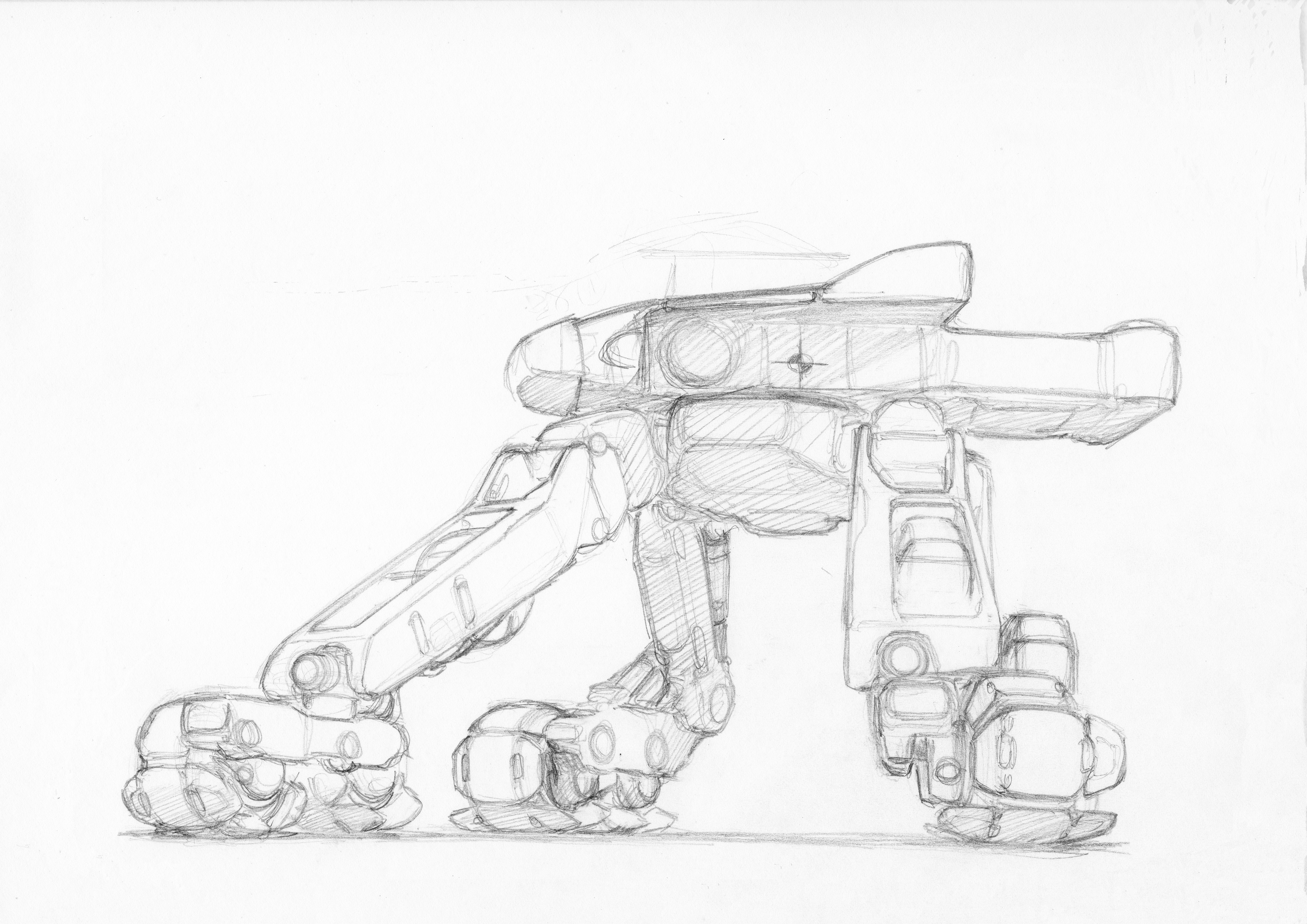 5/6
5/6 6/6
6/6
 skoll-tanaka
skoll-tanakaGUNHED 試験機 ? 動作評価プラットホーム ? 何でもいいけど動きのテストするための試作機
走行 ( タンク ) MODEとドロイド ( スタンディング ) MODEの装甲、兵装無しの 基本無線操縦でAI自動操縦のためのテストプラットホーム
GUNHED 走行MODE試験機
1. 周りにゴムを巻いた走行輪と油気圧サスペンションを装備 データリンクアンテナと全周カメラを機体の周囲に付け走行 ( 最高速度、旋回性能 ) を検証する 可変走行輪ではないので最高速度は直線245km/h 旋回時は前脚の角度と車輪の差動で最小回転半径 ( 外周 ) 6.2m 超信地旋回は不可
2. ラフ
GUNHED ドロイドMODE試験機
3. 走行輪は可変接地面 悪路走行時に走行輪側面が左右に広がって接地面積を稼ぐ 最高速度は流石に80km/h ( 通常走行 180km/h ドロイド走行 140km/h )
立ち上げアクチュエーター ( 前後脚 )と機体 ( 武装、動力プラットホーム ) の安定性の確認する 各脚の最後尾の走行輪は使用しない 前脚の角度と車輪の差動で超信地旋回可
4. ラフ
おまけ
5. GUNHED 内部図解外形ラフ 1
6. GUNHED 内部図解外形ラフ 2
河森正治デザイン
©️河森正治 スタジオぬえ 東宝
350-616
2022-05-28 21:00:03 +0000